A groundbreaking robotic hand design has emerged, capable of detaching from its arm, crawling like a small multi-legged robot, and retrieving objects before reattaching itself. This innovative technology, detailed in the journal Nature Communications, represents a significant advancement in robotics, with potential applications in various fields.
Revolutionizing Robotic Functionality
The research team, led by Kunpeng Yao from the University of Leeds in the UK, developed a robotic hand that can replicate over 30 common human grasp types and lift objects weighing up to two kilograms. Unlike traditional robotic hands, which are designed to mimic human anatomy, this new design seeks to overcome inherent limitations.
Yao explained, “We think the human hand is not perfect. We have a lack of symmetry in the hand, and the hand can only perform a limited number of tasks due to its structure.” He emphasized the aim of their research: “What if we can release those constraints and make the robotic hand go beyond the functionality of the human hand, even more dexterous?”
One notable limitation of human hands is the reliance on a single thumb, which restricts grasping capabilities. Professor Aude Billard from the École Polytechnique Fédérale de Lausanne (EPFL) posed an intriguing question: “Why having only one thumb? What if we had two or more, or any of the fingers could be a thumb?”
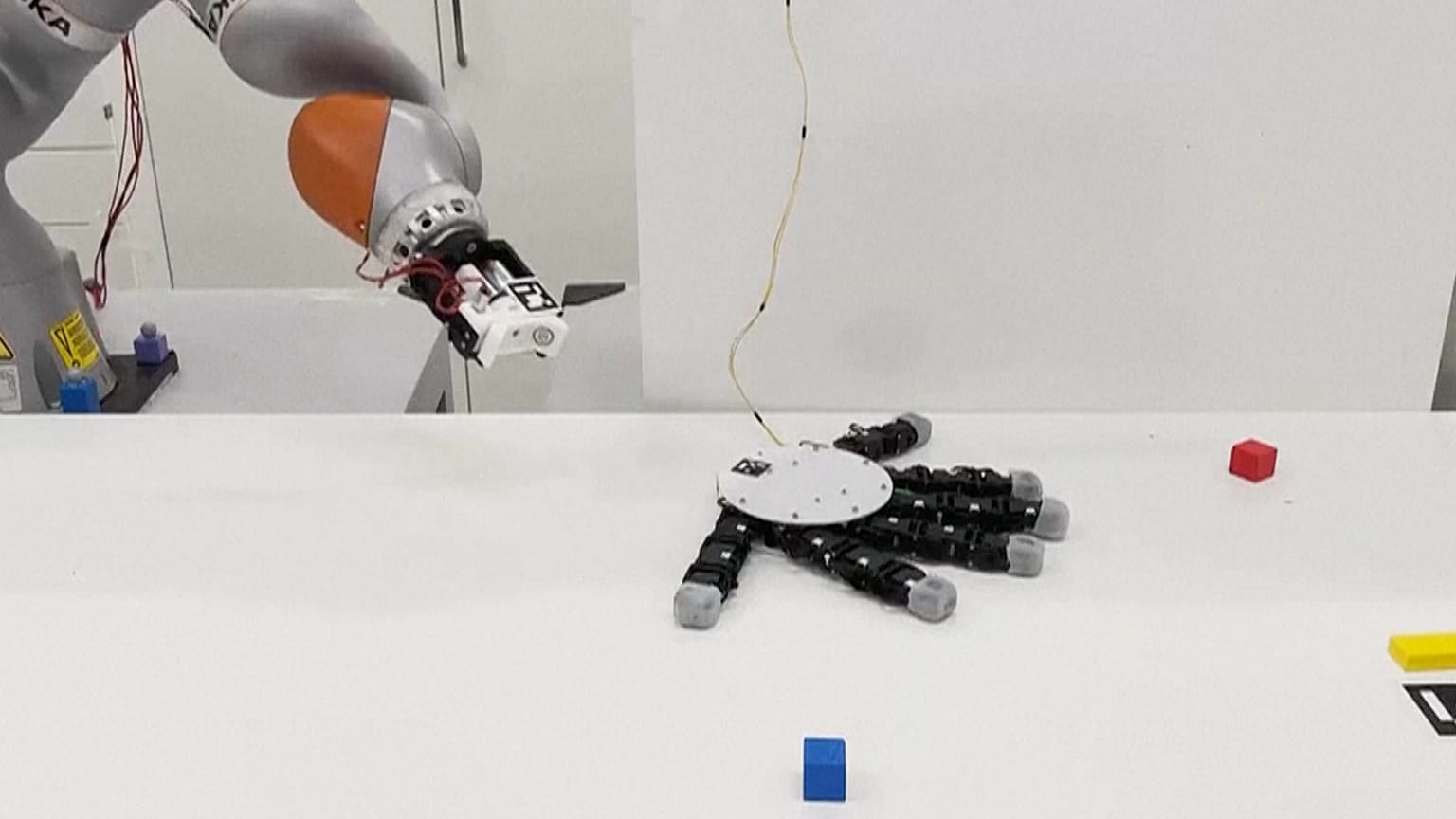
This approach allows for greater flexibility in grasping objects. The researchers created two versions of the hand: one with five fingers and another with six, both featuring a symmetrical design that enables grasping from either side of the palm.
Practical Applications and Future Research
In testing, the robotic hand demonstrated its ability to detach, crawl, and retrieve up to three objects in sequence while maintaining a secure grip. This capability opens up various possibilities for its use in confined spaces, particularly in scenarios such as industrial applications and rescue operations.
Xiao Gao, a co-author based at the School of Robotics at Wuhan University in China, highlighted potential uses: “There are always some confined spaces inside factories where you need a hand that can detach and navigate. For instance, it could go inside an industrial pipeline, allowing it to work in tight or intricate areas.”
As the research progresses, the team plans to explore further applications of this technology, potentially enhancing its utility in emergency situations or complex industrial environments.
The development of this robotic hand represents a noteworthy step forward in robotic technology, merging functionality with innovative design. The implications for industries ranging from manufacturing to emergency response could be profound, as robotics continue to evolve and improve.




